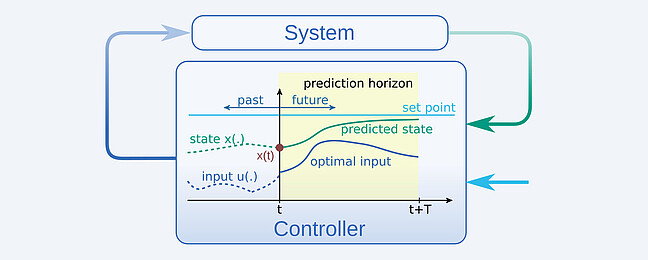


Die modellprädiktive Regelung (MPC) ist ein sehr erfolgreicher, optimierungsbasierter Regelungsansatz. Sie besteht aus der Wiederholung der folgenden Prozedur: Zu jedem Abtastzeitpunkt ist ein Optimalsteuerungsproblem mit endlichem Horizont zu lösen, wobei der erste Teil der entsprechenden optimalen Lösung der Eingangstrajektorie bis zum nächsten Abtastzeitpunkt angewendeet wird. Die Hauptvorteile der prädiktiven Regelung und die Gründe für ihren weit verbreiteten Erfolg in vielen Anwendungsbereichen sind
- die garantierte Einhaltung harter Zustands- und Eingangsbedingungen,
- die direkte Optimierung eines Gütekriteriums im Reglerentwurf und
- die Anwendbarkeit auf allgemeine nichtlineare Systeme mit mehreren Ein- und Ausgängen.
Unsere Forschung widmet sich verschiedenen aktuellen Aspekten der prädiktiven Regelung. Dazu gehören die Entwicklung von robusten, stochastischen und adaptiven MPC-Methoden für unsichere Systeme, die Berücksichtigung allgemeinerer Regelungsziele als die reine Sollwert-/ Trajektverfolgung (ökonomische MPC-Verfahgen), die Untersuchung verteilter MPC-Ansätze für große Systeme sowie daten- und lernbasierte MPC-Methoden.
Ausgewählte Veröffentlichungen
-
(2022): Approximate dissipativity of cost-interconnected systems in distributed economic MPC, IEEE Transactions on Automatic Control
DOI: 10.1109/TAC.2022.3173028 -
(2022): A novel constraint-tightening approach for robust data-driven predictive control, Int J Robust Nonlinear Control, pp. 1-22
DOI: 10.1002/rnc.6532 -
(2021): Transient Performance of Tube-based Robust Economic Model Predictive Control, 7th IFAC Conference on Nonlinear Model Predictive Control NMPC 2021, IFAC-PapersOnline, Vol. 54, Issue 6, pp. 28-35
DOI: 10.1016/j.ifacol.2021.08.520
arXiv: 2102.09404 -
(2020): A nonlinear model predictive control framework using reference generic terminal ingredients, IEEE Transactions on Automatic Control, 2020, 65, 3576-3583
DOI: 10.1109/TAC.2019.2949350 -
(2019): Nonlinear reference tracking: An economic model predictive control perspective, IEEE Trans. Automat. Control, vol. 64, no. 1, pp. 254-269.
DOI: 10.1109/TAC.2018.2800789 -
(2018): Economic Nonlinear Model Predictive Control, Foundations and Trends in Systems and Control,, vol. 5, no. 1, pp. 1-98.
DOI: 10.1561/2600000014 -
(2017): Cost-to-travel functions: a new perspective on optimal and model predictive control, Syst. Contr. Lett., vol. 106, pp. 79-86.
DOI: 10.1016/j.sysconle.2017.06.005 -
(2017): Quadratic costs do not always work in MPC, Automatica, vol. 82, pp. 269 - 277.
DOI: 10.1016/j.automatica.2017.04.058 -
(2017): Economic and distributed model predictive control: recent developments in optimization-based control, SICE Journal of Control, Measurement, and System Integration, vol. 10, no. 2, pp. 39-52.
DOI: 10.9746/jcmsi.10.39
Ausgewählte Projekte
-
Robust and stochastic economic model predictive controlLeitung: Prof. Dr.-Ing. Matthias MüllerTeam:Jahr: 2020Förderung: Deutsche Forschungsgemeinschaft (DFG) - 279734922Laufzeit: 2020 - 2023
-
Multi-vehicle trajectory planning using MPCLeitung: Prof. Dr.-Ing. Matthias MüllerTeam:Jahr: 2021Förderung: Industrial ProjectLaufzeit: 2021 - 2025